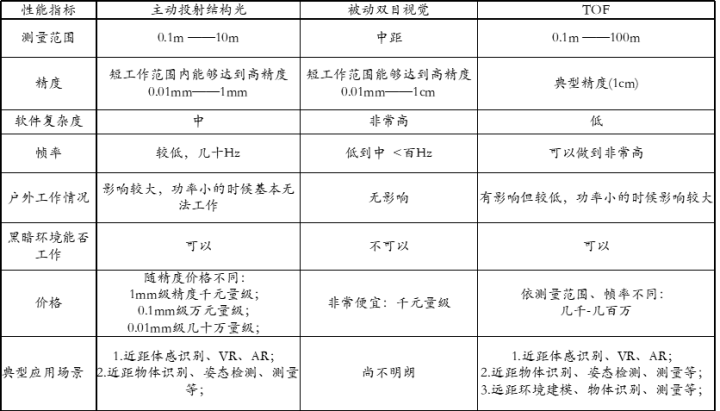
常用的三种类型的深度相机[1],大致分为以下三种:基于主动投射结构光的深度相机(如Kinect 1.0, Intel RealSense, Enshape, Ensenso等)、被动双目相机(如STEROLABS 推出的 ZED 2K Stereo Camera, Point Grey 公司推出的 BumbleBee)以及ToF[2]相机(如微软的Kinect 2.0, MESA 的 SR4000 , Google Project Tango 中使用的PMD Tech 的TOF相机,Intel 的 SoftKinect DepthSense, Basler基于松下的芯片开发的TOF相机以及国内一些初创公司基于TI的方案开发的TOF相机等等)
目前市面上常有的 3D 相机方案就就是下面3种,对应上面的:
(1) 结构光(Structured-light),代表公司有奥比中光(国产,比较推荐,性价比可以,也有高分辨率的款),苹果(Prime Sense),微软 Kinect-1,英特尔RealSense, Mantis Vision 等。
(2) 双目视觉(Stereo),代表公司 Leap Motion, ZED, 大疆;
(3) 光飞行时间法(TOF),代表公司微软 Kinect-2,PMD,SoftKinect, 联想Phab。
 image_1cs5el5cb14m9bhr9ts11rvgve4i.png-82.7kB
image_1cs5el5cb14m9bhr9ts11rvgve4i.png-82.7kB
1. Kinect
先给出结论,KinectV2的精度在2mm~4mm左右,距离越近精度越高,越远精度稍微差点;kinectV1误差约2mm~30mm。
Kinectv2 for Mobile Robot Navigation: Evaluationand Modeling
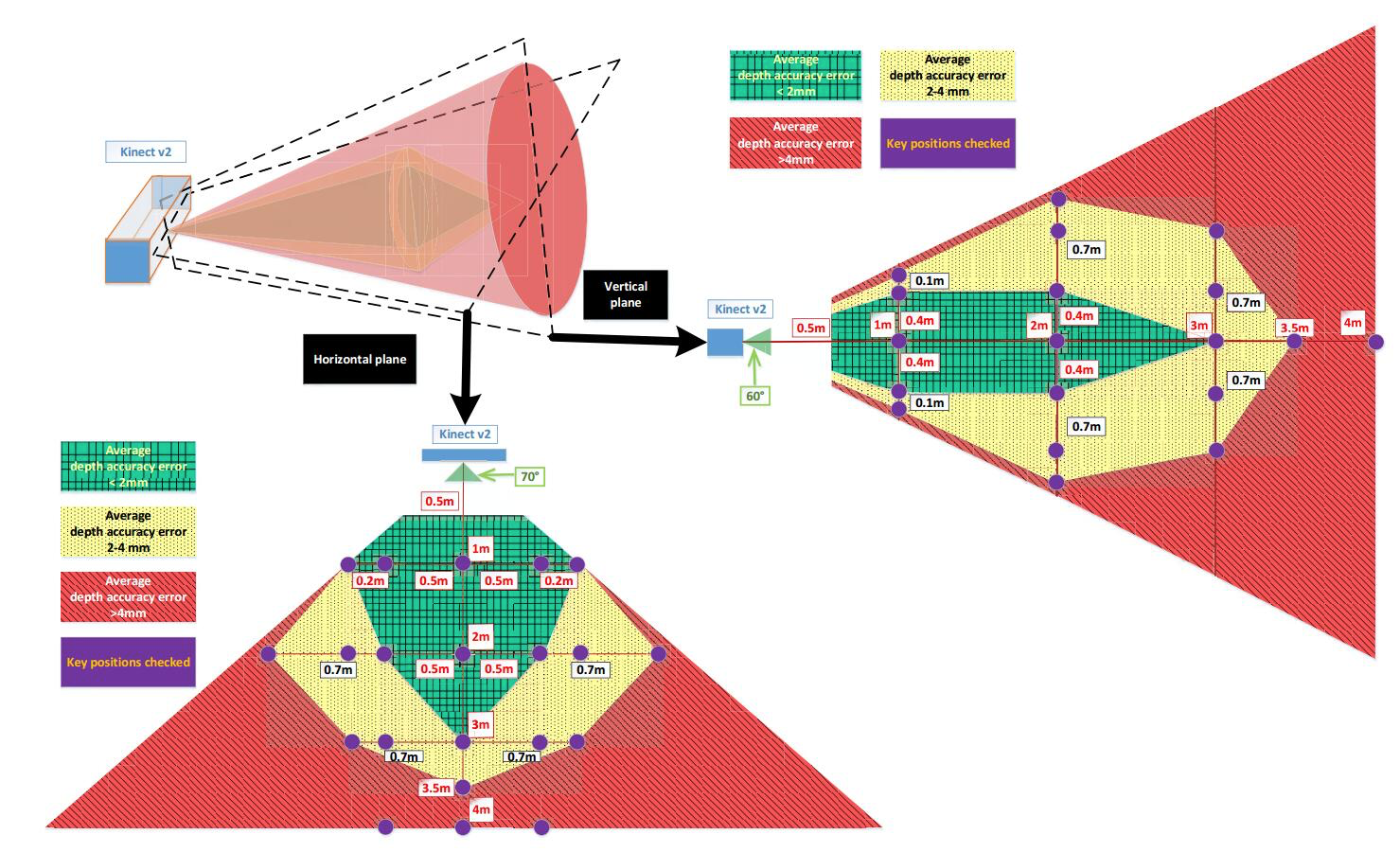
- Kinect v2在不同位置的精度问题
 image_1cs6h8fbdokn1ljf1npuogg1g2b5p.png-1587.5kB
image_1cs6h8fbdokn1ljf1npuogg1g2b5p.png-1587.5kB
如上图所示,右侧大三角是KinectV2在纵向(垂直于地面)的精度分布,下侧大三角是KinectV2在水平面(平行于地面)上的精度分布。在绿色区域精度最高,误差小于2mm,在黄色区域误差在2~4mm,红色区域误差大于4mm。所以在设计交互场景时,在黄色区域以内会达到最好的效果(3.5m内)。如果对精度要求很高,如控制机械,最好在绿色区域进行交互。
2 Kinect v2和Kinect v1
 性能表对比
性能表对比
Kinect v2的rgb视场(FOV[3])是84.1 x 53.8,关于FOV的建模和模型可以参考。
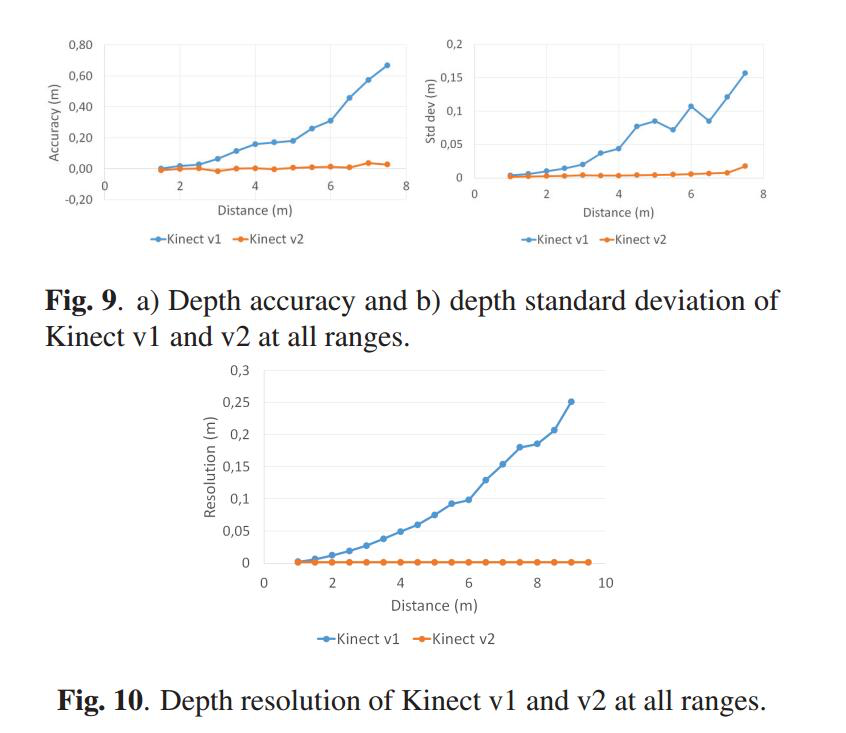 image_1cs6hgs884u61c4cs061tp61d9466.png-274.2kB
image_1cs6hgs884u61c4cs061tp61d9466.png-274.2kB
如图所示,KinectV1随着距离增加,误差指数性增加,在距离达到4m时,kinectV1误差接近0.2m。而KinectV2的误差几乎不随距离增加而变化。V2比V1追踪准确度好20%。V2可以在户外进行人体跟踪,最远到4m。V2在近距离有比V1高2倍的精度,在6m有高数十倍的精度。
-
kinectv1和kinectv2比较
-
|KinectV1|KinectV2
----|----|----
检测范围(Range of Detecton)|0.8–6.0m|0.5 –4.5m
深度误差(depth Uncertainty)|2mm-30mm|<0.5% of range
角度(Angle,horizontal-vertical)|57-43|70-60
3. LeapMotion
LeapMotion的精度平均下来是0.7mm的精度,也是达不到所谓的0.01mm的。
Analysis of the Accuracy and Robustness of the Leap
Motion Controller
上面的论文对初步版本中的Leap Motion控制器进行研究,分别在静态与动态设置下的精度和准确性,考虑到人手的可达到的平均约为0.4mm,实验用设备使用参考笔,位置精度可达0.2mm,且参考笔对仪器精度测量无可观察到的影响。在基于静态设置的测量下,获得了期望的3D位置与小于0.2mm的测量位置之间的与轴无关的偏差。在动态情况下,独立于平面,可以获得小于2.5mm的精度(平均1.2毫米)。重复性平均小于0.17毫米。在基于姿势的用户界面方面,在实际条件下不可能实现0.01mm的理论精度,而是高精度(总平均精度为0.7mm)。
最后比较一下以上设备的优缺点
1. Microsoft Kinect
 image_1cs835f4eiaa4gb1ln31cndcb2an.png-99.9kB
image_1cs835f4eiaa4gb1ln31cndcb2an.png-99.9kB
优点:
- 可以获取深度数据(320*240)、rgb
- 数据(640*480)、声音、骨骼节点(20个)
- 拥有三套 SDK:微软 SDK、OpenNI、libfreenect
- 后两个 SDK 是跨平台,支持各种开发语言
- 价格便宜
- 社区成熟,开发资源丰富
缺点:
- 传感器分辨率不够,看不清手指
- 由于使用结构光技术,深度传感器的可视范围无法重叠
- OpenNI 和 libfreenect 虽然跨平台,但是功能远不如微软 SDK
- 设备尺寸大,需要一坨电源线
- 致命缺点,微软已宣布停止生产 Kinect 一代
2. Microsoft Kinect One
 image_1cs83c41h1bpip0qjqvc2s1aub4.png-84.5kB
image_1cs83c41h1bpip0qjqvc2s1aub4.png-84.5kB
优点:
- 分辨率更大、可以看到更广阔的场景
- 可以检测到的人体关节点更多(25个),能看清手指
- 拥有两套 SDK:微软 SDK、libfreenect2
- 可以开发 Windows Store 应用
缺点:
- libfreenect2 基本不能检测骨骼,功能缺太多,同时 OpenNI 也不支持它,因此局限于 Windows 平台
- 设备尺寸比一代更大,需要一坨电源线,比一代贵一些
- 致命缺点:只能运行在 64 位 Windows 8 系统上,必须使用 USB 3.0 端口
3. Intel / Creative / SoftKinetic
 image_1cs83s6uv6941lg0gaonlg1ocp19.png-259.3kB
image_1cs83s6uv6941lg0gaonlg1ocp19.png-259.3kB
优点:
- 小巧,普通 USB 摄像头的尺寸
- 不需要外界电源线
- 近距离使用,可实现表情分析和手势识别
缺点:
- 不适合远距离交互,也无法检测完整的身体
- 只能在中高端的 Intel CPU 上才能运行
4. Leap Motion
 image_1cs83t6bukpppr9f021dtt1cdo1m.png-170.4kB
image_1cs83t6bukpppr9f021dtt1cdo1m.png-170.4kB
优点:
- 小巧,一根 usb 线就可以使用
- 跨平台
- 支持的开发语言比较多,甚至通过 WebSocket
- 实现了浏览器中的 JavaScript API
- 跟踪手指和手掌,精度较高
缺点:
- 检测范围小,手臂酸疼(见上图)
- 不能检测身体和脸部
- 作为生产力工具,完全无法替代鼠标键盘
- 致命缺点:找不到合适的使用场景
5. PrimeSense / Apple / 华硕(ASUS)
 image_1cs8479dm6sncqr1ulgb1e1l5r23.png-80.6kB
image_1cs8479dm6sncqr1ulgb1e1l5r23.png-80.6kB
和 Kinect 一代的优缺点类似,












网友评论